

引 言
智能控制作为一门新兴的理论和技术[1>,突破了传统的必须依赖被控对象数学模型的控制方案,它的发展给电气传动系统的控制策略带来新思想、新方法。
开关磁阻电动机(SRM)是一个多变量、强耦合的非线性系统[2>,采用传统的PID控制已经不能从根本上解决非线性问题。PID控制是最早发展起来的控制策略之一,由于算法简单、鲁棒性好、可靠性高,被广泛应用于工业过程控制。所以也没必要完全甩掉传统的控制方法。基于此想法,本文的主要工作是研究如何将智能控制和PID控制两者结合起来,使之既具有智能控制灵活而适应强的优点,又具有PID控制精度高的特点,以此达到较好的控制效果。
1 模糊PD+比例积分控制器设计
PID参数的设定必须考虑在不同时刻三个参数的作用以及相互之间的互联关系【3】。传统的PID控制一方面参数的整定没有实现自动化,另一方面这种控制必须精确地确定对象模型。而开关磁阻电动机(SRM)得不到精确的数学模型,控制参数变化和非线性,使得固定参数的PID控制不能使开关磁阻电动机控制系统在各种工况下保持设计时的性能指标。
模糊控制器是一种近年来发展起来的新型控制器,其优点是不需要掌握受控对象的精确数学模型,而根据人工控制规则组织控制决策表,然后由该表决定控制量的大小【4】。因此采用模糊控制,对开关磁阻电动机(SRM)进行控制是改善系统性能的一种途径,也是近年来十分热门的研究课题。模糊控制和PID控制两者结合起来,扬长补短是本文设计模糊控制器的宗旨。
1.1 提高模糊控制精度、减小振荡摆动的一种方法
在实际应用中,模糊控制器的设计首先是离线完成模糊控制表的设计,然后进行在线查表控制【5】。实践中发现,常规模糊控制器的设计存在一些不足,如控制表中数据有跳跃,平滑性较差,这对控制效果有影响。
文中提出的方法从两个方面考虑:一是由线性控制理论可知,积分控制作用能消除稳态误差,但动态响应慢,比例控制作用动态响应快,而比例积分控制既能获得较高的稳态精度,又能具有较高的动态响应。因此,把PI控制策略引入Fuzzy控制器,构成Fuzzy-PI复合控制,是改善模糊控制器稳态性能的一种途径。
二是增加模糊量化论域是提高模糊控制器稳态精度的最直接的方法,但这种方法要增大模糊推理的计算量,况且量化论域的增加也不是无止境的。
把两种方法结合起来,在MATLAB环境下,研究了模糊推理算法,利用计算机方便地解决了由于增加模糊量化论域而产生的复杂计算。同时常规模糊控制器与PI复合部分在实施控制时完全由软件来实现,可起到较好的效果。文中所设计的模糊PID控制器,一是控制表中数据跳跃小,平滑性较好,二是比例积分的引入使系统的稳态精度大大提高,能很好地解决零点附近的摆动和脉动问题,做到稳态时无静差。比仅在某一个方面改善模糊控制器的性能显然具有优势。
1.1.1 隶属函数与控制规则的确定
考虑到电机转速偏差范围大及高精度的特点,将偏差变量、偏差变化率及控制量的论域界均定为17个等级。
{-8,-7,-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6,7,8 }
将偏差变量、偏差变化率及控制量的模糊语言值均分为九档
{ 负大,负中,负小,负很小,零,正很小,正小,正中,正大 }
{ NB, NM, NS, NVS, ZO, PVS, PS, PM, PB }
偏差变量、偏差变化率及控制量的模糊子集的隶属函数的形状均选为三角形如图1所示。
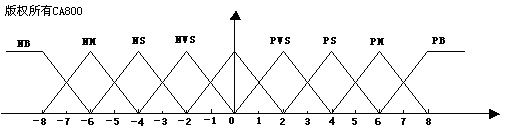
图1 均匀分布隶属函数图
Fig 1 The chart of equably distributing subjection function
模糊控制器的控制规则是基于专家或操作者的经验得出,控制规则的生成方法有很多。本文借鉴常规模糊控制器设计经验并根据系统阶跃信号的响应确定模糊控制规则表如表1所示:
Table1 Improving rules of fuzzy control
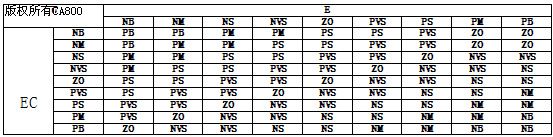
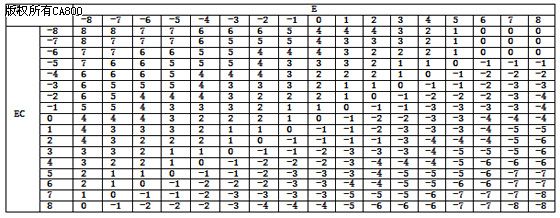
表中共有81条控制规则,其中一些规则可以合并,但利用计算机进行推理计算这些规则就没有必要合并了。模糊控制规则表征了变量之间的模糊关系,由控制规则求出模糊关系矩阵R,经过推理合成得到模糊控制向量。系统采用加全平均法实现模糊判决求得精确量的控制表如表2所示。
Table2 Control table
1.2 仿真
用常规模糊控制器组成一个系统,进行仿真如图2所示。被控对象是一台交流电动机, ,r1=2.356Ω,r2=1.897Ω,Ls=238mH,Lr=238mH,Lm=219mH。空载启动,过2秒后突加20N.m的负载,仿真参数算法为ode45,仿真结果如图3所示。
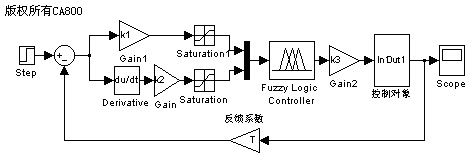
图2 常规模糊控制系统仿真框图
Fig2 Smitation of general fuzzy control system
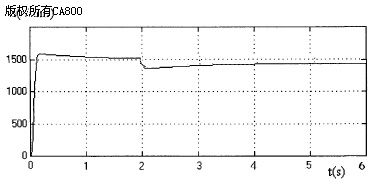
图3 常规模糊控制系统仿真曲线
Fig 3 Smitation curve of general fuzzy control system
仿真表明:模糊系统对给定阶跃响应可以获得满意的特性,但对负载扰动有固定的误差,既不能消除扰动引起的误差,导致系统的稳态精度不高。这是采用常规二维模糊控制器最突出的缺点。加上控制表的元素不可能分得太细,在快速跟踪时,零点附近的摆动和脉动无法克服。模糊控制本身是一个有差系统,相当于传统的PD控制,不能消除误差,故控制精度受到影响,要提高精度必须对控制器的结构作进一步的改进。
模糊控制器+比例积分复合控制,被控对象仍采用上面用过的交流电动机,输入阶跃函数,空载启动,过2秒后突加20N.m的负载,仿真参数算法为ode45。用文中的控制规则进行仿真,系统的仿真结构图如图4所示,仿真结果如图5所示。不难看出,模糊PID控制能有效地消除扰动引起的误差,系统的上升时间加快,超调减小,整个系统动态性能的提高明显,充分证明本文所设计模糊PID控制器优与常规的模糊控制器。
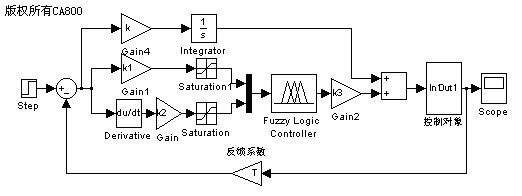
图4 模糊控制系统仿真框图
Fig 4 Smitation of fuzzy control syste
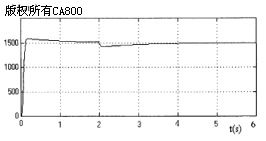
图5 模糊控制系统仿真曲线
Fig 5 Smitation curve of fuzzy control system
2 模糊PID控制在开关磁阻电动机控制中的应用
由于开关磁阻电动机控制系统在不同的速度范围内有不同的控制方式,难以建立精确的数学模型,它是一种变结构和变参数的非线性控制系统。本文针对开关磁阻电动机控制系统的实际情况将上述设计的模糊PID控制用于该系统中,组成的SRM控制系统如图6所示。
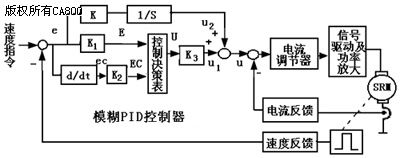
图6 模糊PID控制的SRM控制系统框图
Fig 6 SRM control system of fuzzy PID controller
2.1 模糊PID控制器量化因子的确定
模糊PID控制器的输入分别是速度偏差e和速度偏差变换率de/dt,K1-速度偏差e的量化因子,K2-速度偏差变化率de/dt的量化因子,K3-控制量的量化因子。一般来说,K1、K2、K3分别由下面的公式确定。
在上面的三个公式中,K1、K2、K3的量化论域均为8。偏差e的基本论域范围为[-2000r/min,+2000r/min>,偏差变化率de/dt的基本论域范围为[-300r/min,+300r/min>,控制量的基本论域范围为[-45V,+45V>,即可得到量化因子的理论计算值。
大量的实验表明K1、K2、K3的大小对模糊控制器的影响很大。理论上的值要经过实践的检验,在实验中经过反复摸索、观察、多次调整,本文所设计的模糊PID控制器当K1=0.0055,K2=0.02,K3=4.5时,效果比较好,能得以应用。
2.2 实验结果
开关磁组电动机选用四相8/6结构,基本性能参数为:额定功率7.5KW,额定转速1500r/min,转速范围60~2000r/min, 额定输入电压380V/50Hz。由于在实验中电机的速度不超过2000r/min,速度采样时间设定为55ms,电流周期在5~22ms之间,电流的采样时间约为55μs。实验结果表明本文设计的模糊PID明显好于常规的模糊控制算法,如7图和8图所示。
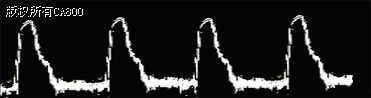
图7 转速1800r/min时的相电流实拍波形(模糊PID)
Fig7 a phase current of 1800r/min on photograph taking (FUZZY PID)
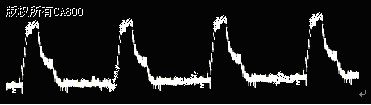
图8 转速1800r/min时的相电流实拍波形(常规模糊控制)
Fig.8 a phase current of 1800r/min on photograph taking(general fuzzy control)
3 结论
本文设计的模糊PID控制算法应用到开关磁阻电动机调速系统不但可行,且效果很好,已在油田抽油机上使用的开关磁阻电动机控制系统中获得成功的应用。
本文的创新点是:成功的将模糊技术用于开关磁阻电动机控制,并在实际中得到了很好的应用。
参考文献:
[1> 诸静(ZHU Jing).模糊控制原理与应用(Theory and Application of Fuzzy Control) [M> 北京:机械工业出版社(Beijing:Mechanism Industry Press),2002
[2> 王宏华(WANG Hong-hua).开关磁阻电动机调速控制技术(Speed-controlling Tecnology of Switched Reluctance Motor)[M>.北京:机械工业出版社(Beijing:Mechanism Industry Press),1999.
[3> 陶永华(TAO Yong-hua).新型PID控制及应用(Control and Application of New Type PID)[M>.北京:机械工业出版社(Beijing:Mechanism Industry Press),1999.
[4> 程仁洪,徐奉生(Cheng Ren-hong, Xu Feng-sheng).基于模糊逻辑的混合型电机速度控制器(Compound motors speed controller based on fuzzy logic).电机与控制学报(Electric Machines and Control),1999 Vol.6
[5> 廖京盛,游林儒,张清华,张友斌.基于TMS320LF2407的模糊控制直流调速系统[J>.微计算机信息,2005,4:101-102





































































 京公网安备 11011202001138号
京公网安备 11011202001138号