

01 看点一:MR-JE-C伺服CC-IEF Basic网络通信的建立
功能介绍
CC-Link IE Field Basic不仅可以支持循环通信协议,还可以与TCP/IP通信协议并存,进而构筑高自由度的系统。从控制器侧可以监视每组最多16轴,共64轴的伺服放大器系统。轨迹位置模式下,可以经由控制器提供的位置数据(目标位置),进行定位运行。
视频亮点
1.FX5U通过CC-Link IE Field Basic通信功能,与MR-JE-C伺服建立连接的参数设置方法。
2.FX5U通过CC-Link IE Field Basic通信功能,与MR-JE-C伺服建立连接的程序举例。

功能实现的操作步骤
1、伺服放大器网络参数设定:[参数]→[EtherNet]→[网络1]→[IP地址设置]

2、伺服放大器控制模式设置:[参数]→[通用]→[基本设置]→[控制模式]

3、PLC参数的设定:[参数]→[FX5UCPU]→[模块参数]→[以太网端口]
设置CC-Link IE Field Basic功能的启用

4、PLC参数的设定:[CC-Link IE Field Basic设置]→[刷新设置]→[详细设置]
设置MR-JE-C伺服与CPU软元件的映射关系

5、PLC侧程序制作

02 看点二:MR-JE-C伺服通过CC- Link IE Field Basic网络实现轨迹速度控制操作

功能介绍
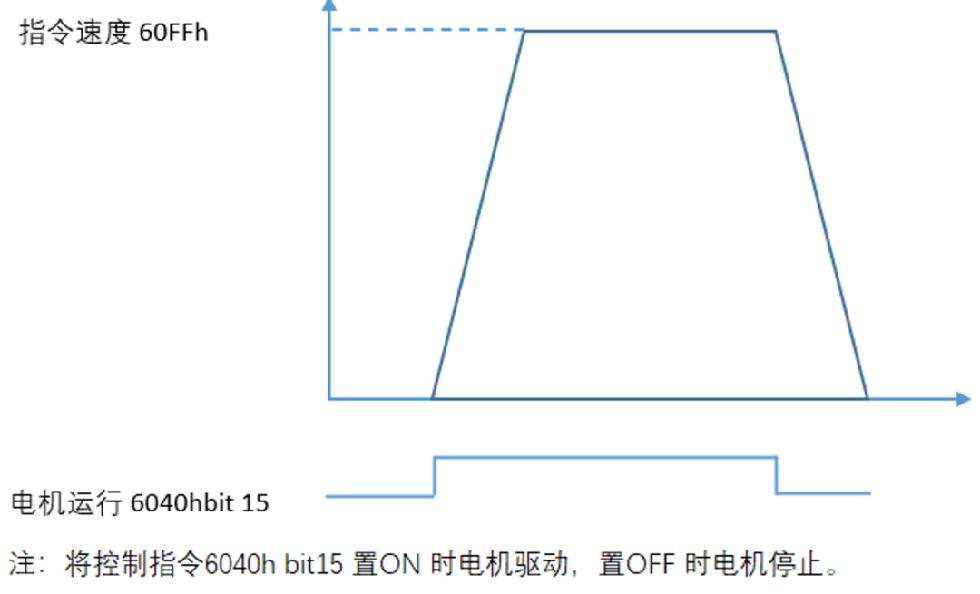
轨迹速度控制即速度控制。该功能用法简单,仅需将6060设置为控制模式“3”,通过60FF设置指令速度值,再使得6040的bit15为ON,即可启动运行,实现对伺服的速度控制。
在通过CC-Link IE Field Basic控制MR‐JE‐C 时,不同于QD75 QD77MS等定位模块,该模式下MR-JE-C伺服没有单独的JOG 功能。所以,需要进行JOG 操作的场合,可以通过轨迹速度模式来实现。
视频亮点
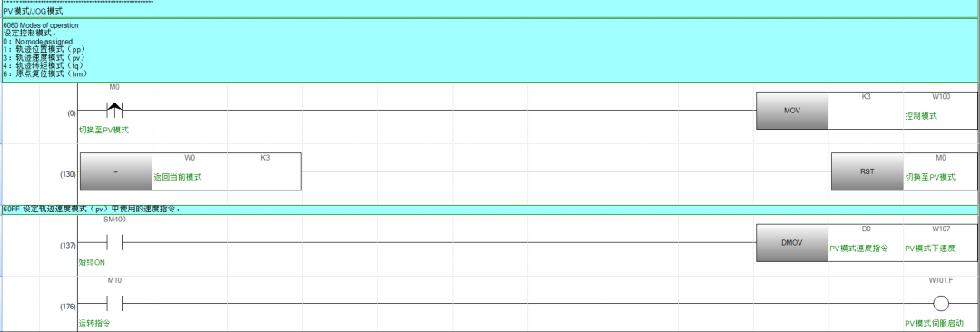
通过实例程序介绍MR-JE-C伺服通过 CC-Link IE Field Basic网络实现轨迹速度模式实现方法。
设置要点
1.设置控制模式:PV(6060h)
2.设置指令速度(60FFh)
3.将控制指令6040h bit15 置ON时电机驱动,置OFF 时电机停止。
[相关产品简介] MR-JE-C伺服系统

三菱电机通用AC伺服MELSERVO-JE-C系列伺服不仅拥有位置控制、速度控制和转矩控制三种控制模式。以及可以切换位置/速度控制、速度/转矩控制及转矩/位置控制的控制方式进行运行。
还支持通过从控制器的通信来驱动电机的轨迹位置/速度/转矩模式。在轨迹位置模式下指定目标位置、目标速度、加速时间常数、减速时间常数等后,即在伺服放大器内部生成位置指令进行驱动。
其拥有1个Ethernet端口,可通过CC-Link IE Field现场网络Basic、SLMP等各种开放式网络来驱动电机、进行监视、设定参数等。
支持一键式调整和实时自动调谐功能,并可以根据各种机械的特性简单地自动调整伺服增益。
通过Tough Drive功能与驱动记录器功能、预防保全支援功能,对机器的维护和检查提供强有力的支持。
通过USB通信接口,与安装了MR Configurator2的计算机等连接后,可以进行参数设定、试运行、增益调整。
伺服电机中采用了分辨率为131072pulses/rev的绝对位置编码器,可进行高精度定位。





































































 京公网安备 11011202001138号
京公网安备 11011202001138号