

在复杂的机械设备中,诸如轴承和导轨等组件由于生产过程中的限制,不可避免地会存在一定的制造公差。这些公差如果不加以处理,累积起来就会影响设备的整体运行精度。如何有效地解决这一难题,成为衡量一个设备性能和可靠性的重要指标。本次小莫科普,就介绍Elmo驱动器如何利用轴级误差修正,在运动过程中“虚拟”补偿此类公差。
Elmo采用的是驱动器级误差修正技术,这是一种在电机控制领域通过精确的数字处理手段来弥补硬件组件缺陷的误差修正技术。为了进行误差修正,驱动器使用示教过程(通常使用外部校准设备完成)来映射误差并生成补偿数据。这些数据在预载入驱动器后,会自动“即时”添加到运动轨迹中。
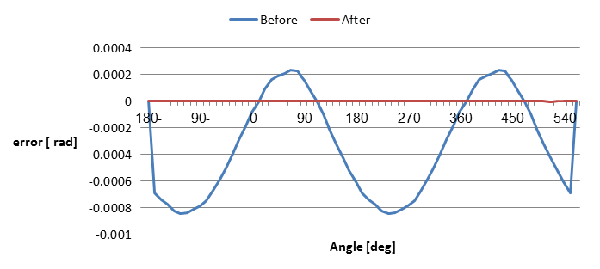
下图显示了典型组件的驱动器误差修正前后对比图:
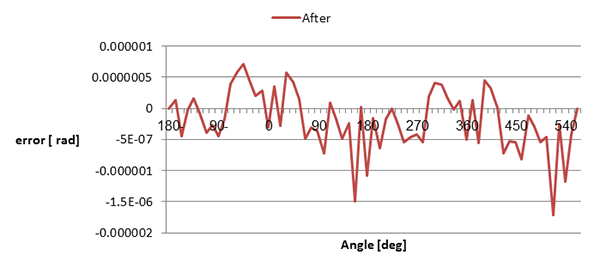
下面的详细缩放图显示了用于运动补偿的数据级别:
Elmo误差修正设计特点:
● 在驱动器级提供一维(单轴)修正;
● 使用单独测量程序提供的参数;
● 自动结合正在使用的其他修正方法。
Elmo驱动器级误差修正技术可以在不改变物理组件的前提下,通过软件层面的优化,显著提高整个电机系统的性能和精度。同时还可以提升了设备的运行效率,延长了硬件的使用寿命。
(来源:Elmo埃莫运动控制)





































































 京公网安备 11011202001138号
京公网安备 11011202001138号