

引言
ATI致力于机器人末端执行器的研发制造有三十余年,已生产制造了世界上高性能的六维力和力矩传感器,目前已在机器人、航空航天、生物医学、科研等领域得到了广泛应用,特别是在机器人领域,在为机器人提供触觉感知方面起了关键作用。
什么是六维力/力矩传感器?
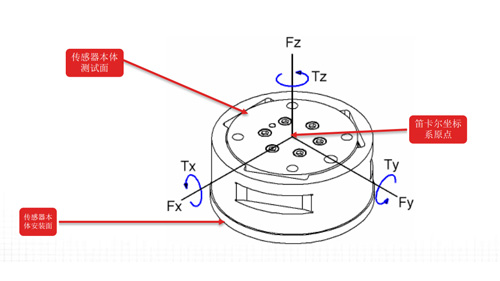
六维力/力矩传感器指的是一种能够在笛卡尔坐标系中同时测量力和力矩并且可以各三个分量的转换成为电信号的器件。
为什么选择ATI的六维力/力矩传感器?
对于检测、预防、科研、测量等应用领域来讲,有效且可靠的数据对它们来讲是至关重要的。如果数据不精准就给整个工作带来很大的麻烦。所以选择一个可输出高分辨率和精度的力和力矩数据数值的传感器,这对一些需要掌握应用过程中的力交互信息的用户至关重要。
ATI的六维力/力矩传感器采用硅应变原理,将机械负载转化为力和力矩值,并且能够测量出六维的数值。ATI的传感器使用的是灵敏度非常高的硅应变片,极大的提高了信噪比,传感器内部结构稳固,稳定性极高。
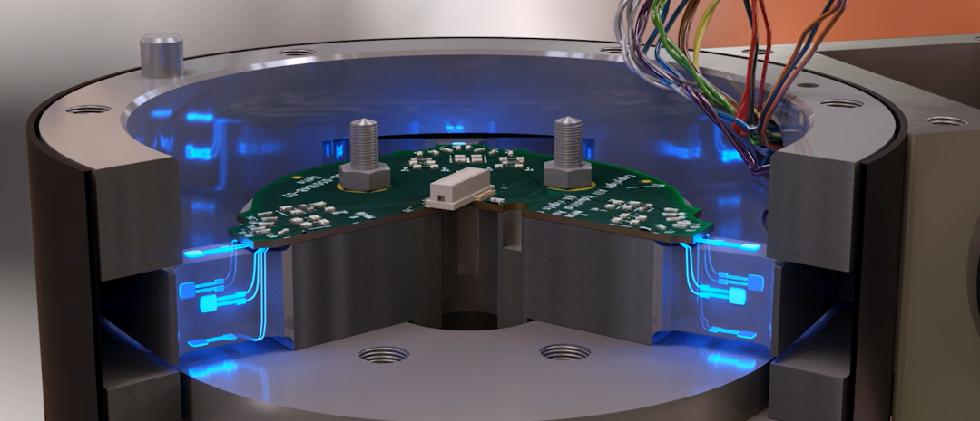
传感器解刨图
相较于单轴压力传感器而言,使用六轴力/力矩传感器可以感受六维的力和力矩而非一维的数据。它可测量在任何方向、任何轴上的应用负载,并能承受额定测量范围5到20倍的负载,同时ATI的六维力和力矩传感器有多种型号和通讯方式可选,通讯方式包括Net FT,wireless FT,EtherCAT FT,DAQ FT,Contrloller FT,串口等等。量程范围从最小12N和50Nmm到88000N和6000Nm,可满足不同机器人型号及应用的选择。
六维力/力矩传感器的作用
1、检测-检测是否抓取到工件

2、预防-在损坏前检测到不正常的装配力

3、测量-记录工艺过程的力反馈实时确保质量

4、控制-利用力/力矩传感器来引导机器人在复杂的工作环境中的过程控制

5、示教-手动牵引示教机器人轨迹或自动触发确定位置

6、保护-安全感应可以检测意外接触情况下与人的接触

如何正确选择ATI六维力/力矩传感器?
1、传感器选型的难点
传感器选型难点在于应用多样性、复杂性。由于传感器量程和精度成反比关系,选择合适量程的传感器才能使精度达到最大;同时在复杂应用场景下,传感器本体除精度外是否能适应应用场也是个要考虑的问题;在精密机构当中的传感器如何安装在狭小空间内,如何与机构融为一体等等。

ATI力和力矩传感器
2、ATI传感器选型四步法
在千变万化的应用环境中,选择合适的传感器至关重要。可以被归纳为四个核心步骤。
1) 确定量程需求-即可确认传感器本体体型号
2) 确定使用环境-即可确认传感器本体防护等级
3) 确定机械出线需求-同样可确定传感器本体防护等级
4) 确定通讯方式(上位机)-通过这步可以确定传感器通讯系统及软件
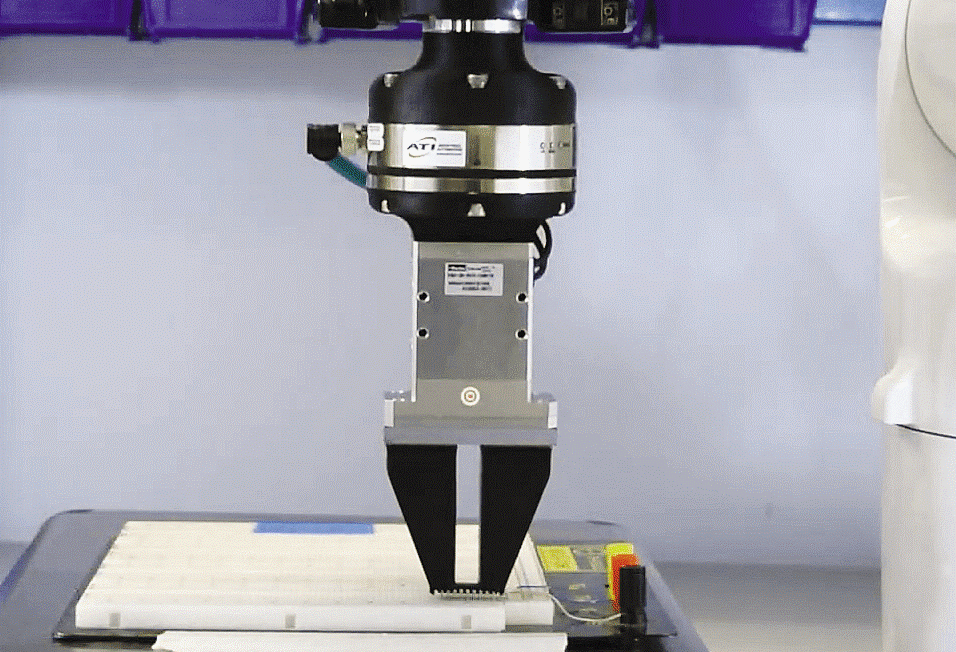
传感器的安装方式
传感器安装在机器人的第六轴,在传感器本体的上下面各需要一个机器人法兰进行连接,最后在安装机器人工具或者测试件,如下图所示:

自带过渡板
注:ATI传感器分为带安装孔的小型传感器和自带过渡板的大型传感器,大型传感器过渡板拆下自行加工安装孔接口。
六维力/力矩传感器应用行业
1、工业自动化及制造

ATI的六维力/力矩传感器应用于弯管内的曲面打磨
ATI的六维力/力矩传感器应用于高精度电子装配

ATI的六维力/力矩传感器应用于汽车座椅测试
2、研究与开发
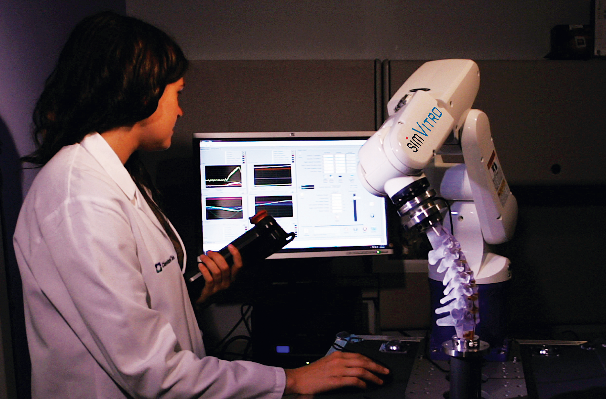
ATI的六维力/力矩传感器用于仿生医学研究

ATI的六维力/力矩传感器用于核设备拆除
3、医疗行业

ATI的六维力/力矩传感器应用于口腔种植牙手术

ATI的六维力/力矩传感器应用于外科手术
4、定制传感器

ATI航天级传感器
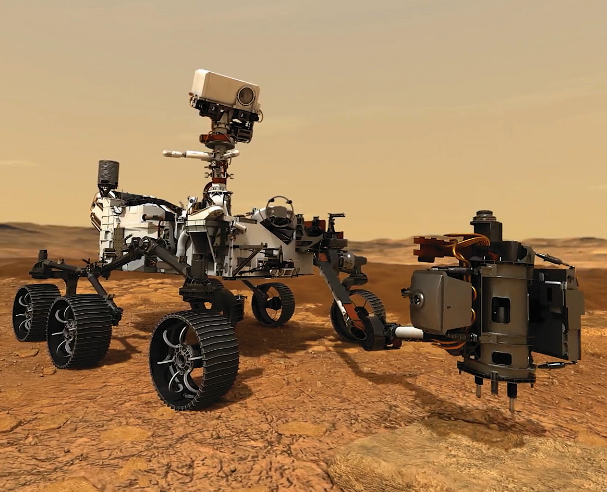
毅力号火星车
ATI有专属的定制服务,上图是ATI工程研发团队为航空航天行业定制的专属应用于航天级别传感器,同时ATI也是全球首个可制作应用于太空航天级别的传感器公司,可以说客户提出的需求,ATI都可以满足。
力和力矩传感器为机器人提供触觉感知,使机器人可代替人类完成一些重复性工作。而它赋予我们最重要的能力是使得机器人被用于其它人类无法进行的领域。ATI的研发团队会持续创新,绝不止步于此。
(来源:ATI工业自动化)





































































 京公网安备 11011202001138号
京公网安备 11011202001138号